SHIROKU.NET
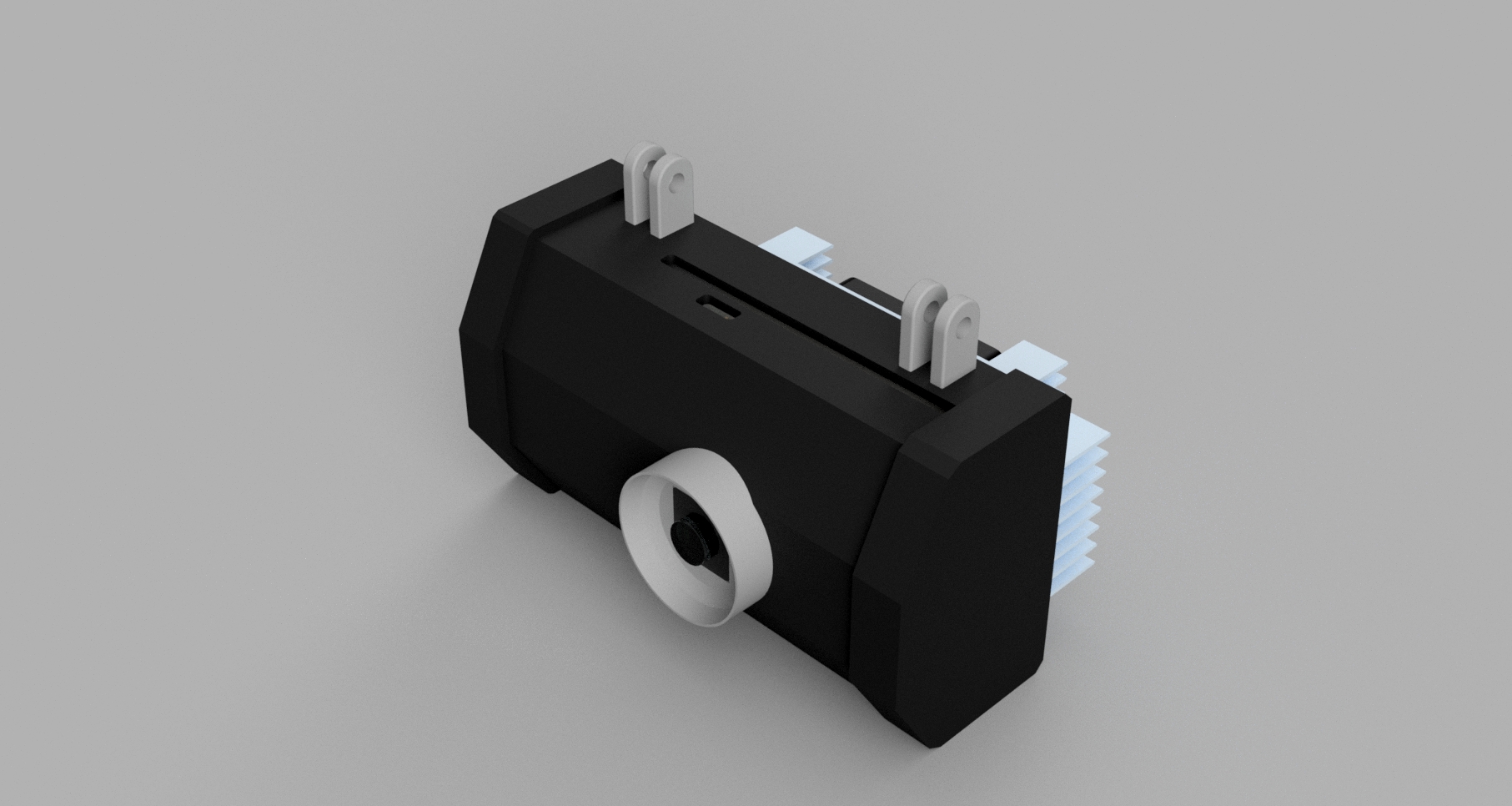
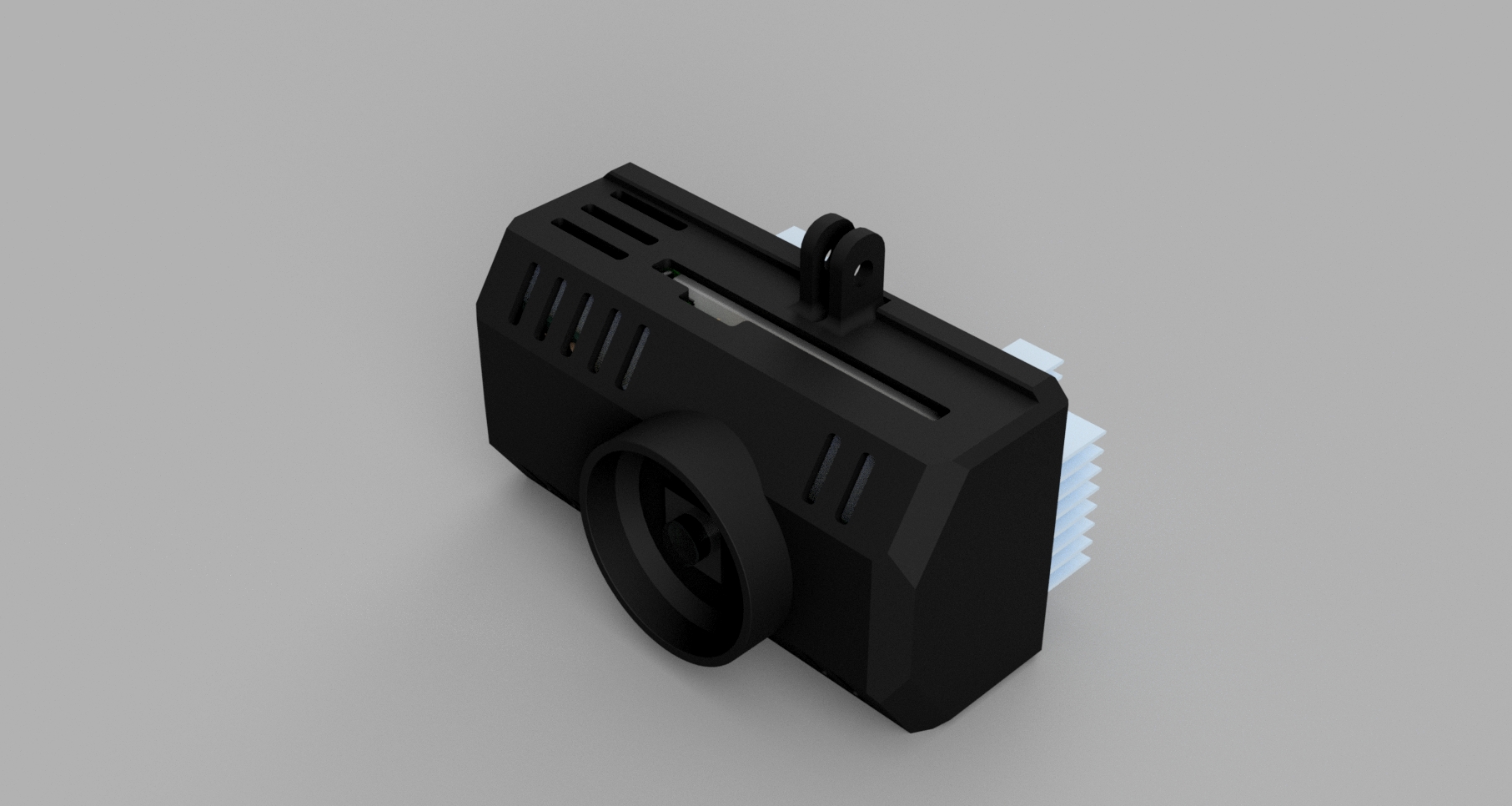
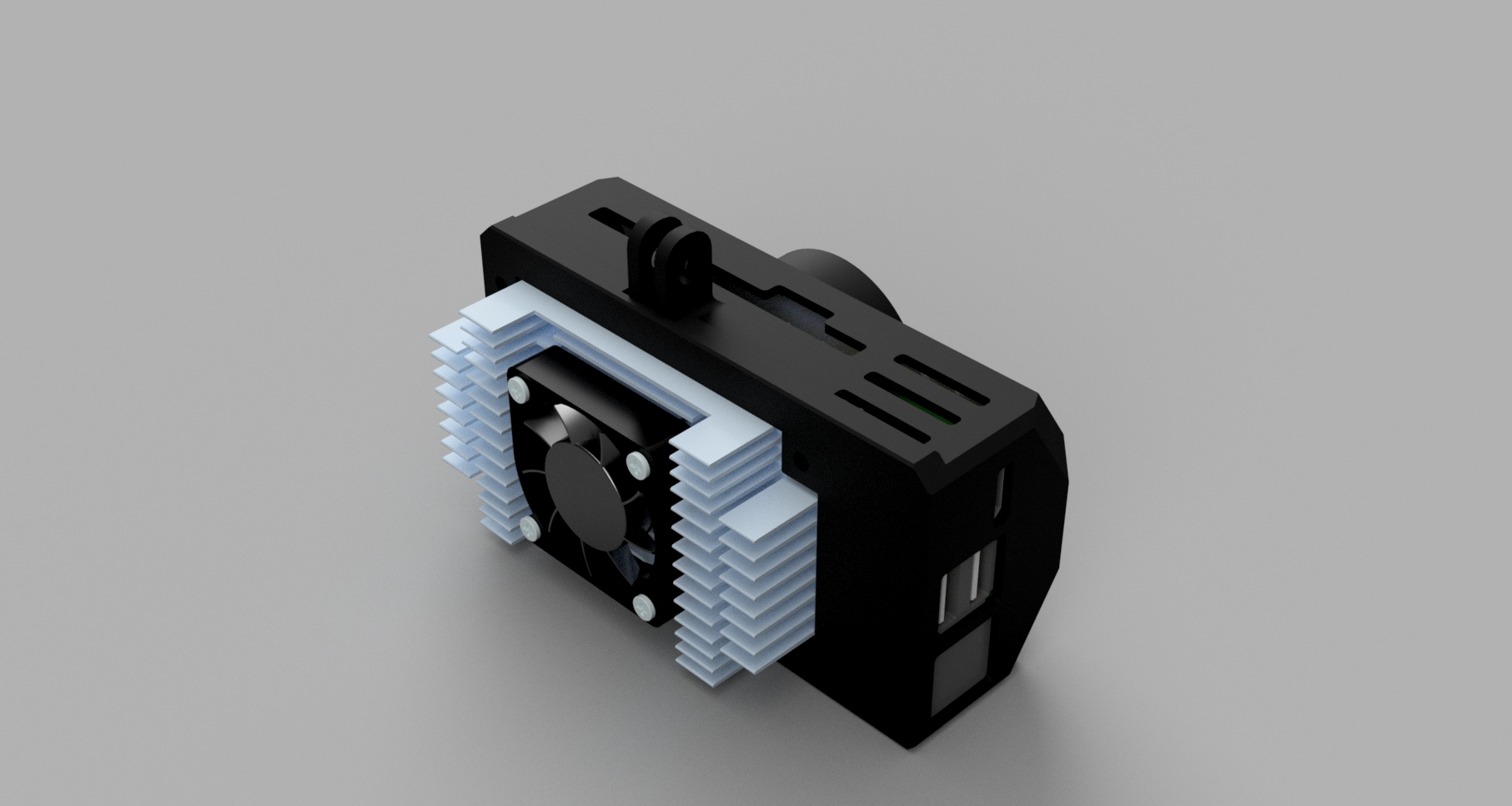
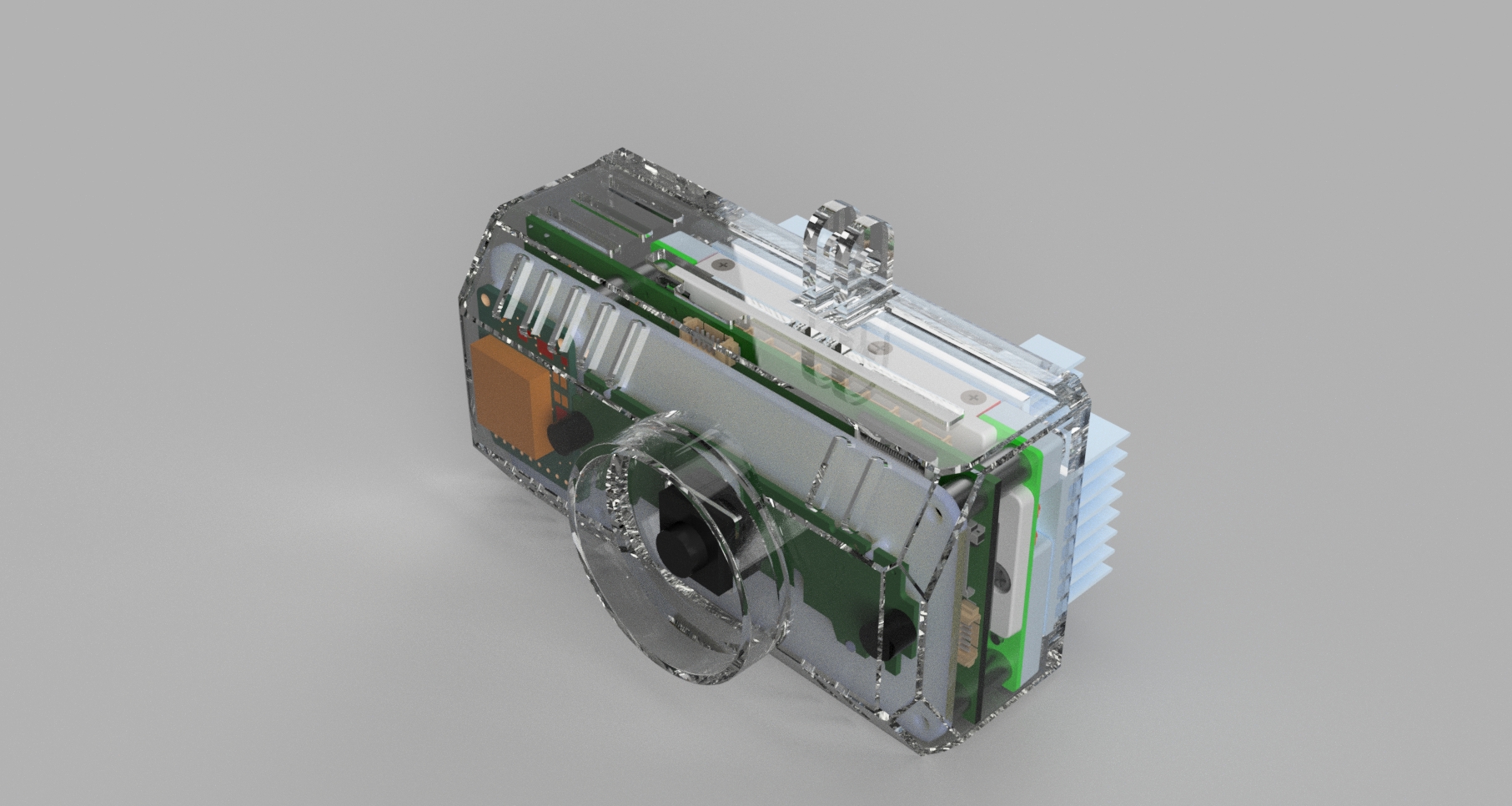
Test Design ADAS Camera of Jetson TX2
Written by
shiroku
in
Robotics
v0.1
v0.2
Fusion 360
IzanagiDrive
J120-IMU
JetsonTX2
←
Disassembly Logitech C930e
Simple Finite State Machine for HMI of ADAS using freeRTOS
→
More posts
2025年振り返り
2025-12-31
2024年振り返り
2025-01-01
2023年振り返り
2023-12-31
2022年振り返り
2022-12-31