Environment
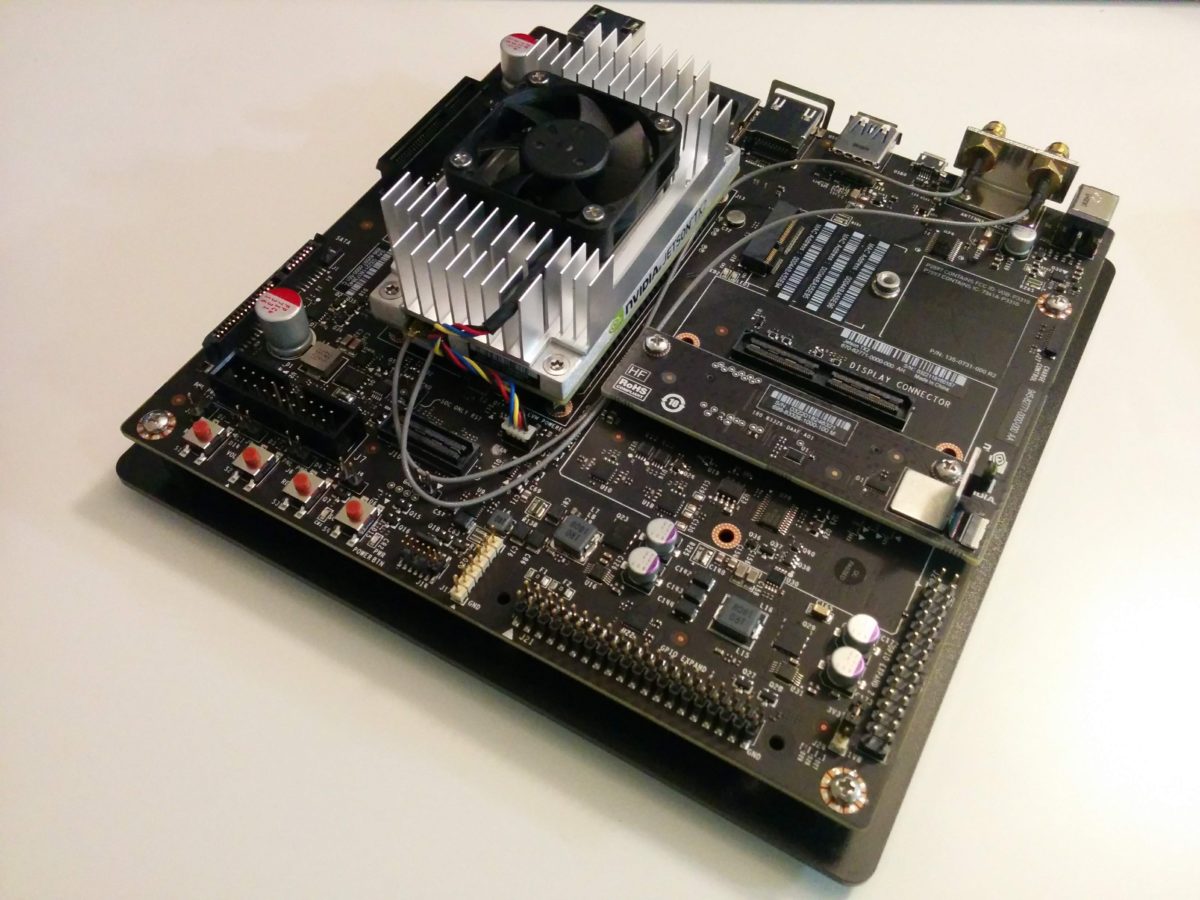
- Jetson TX2
- Ubuntu 16.04
- ROS Kinetic

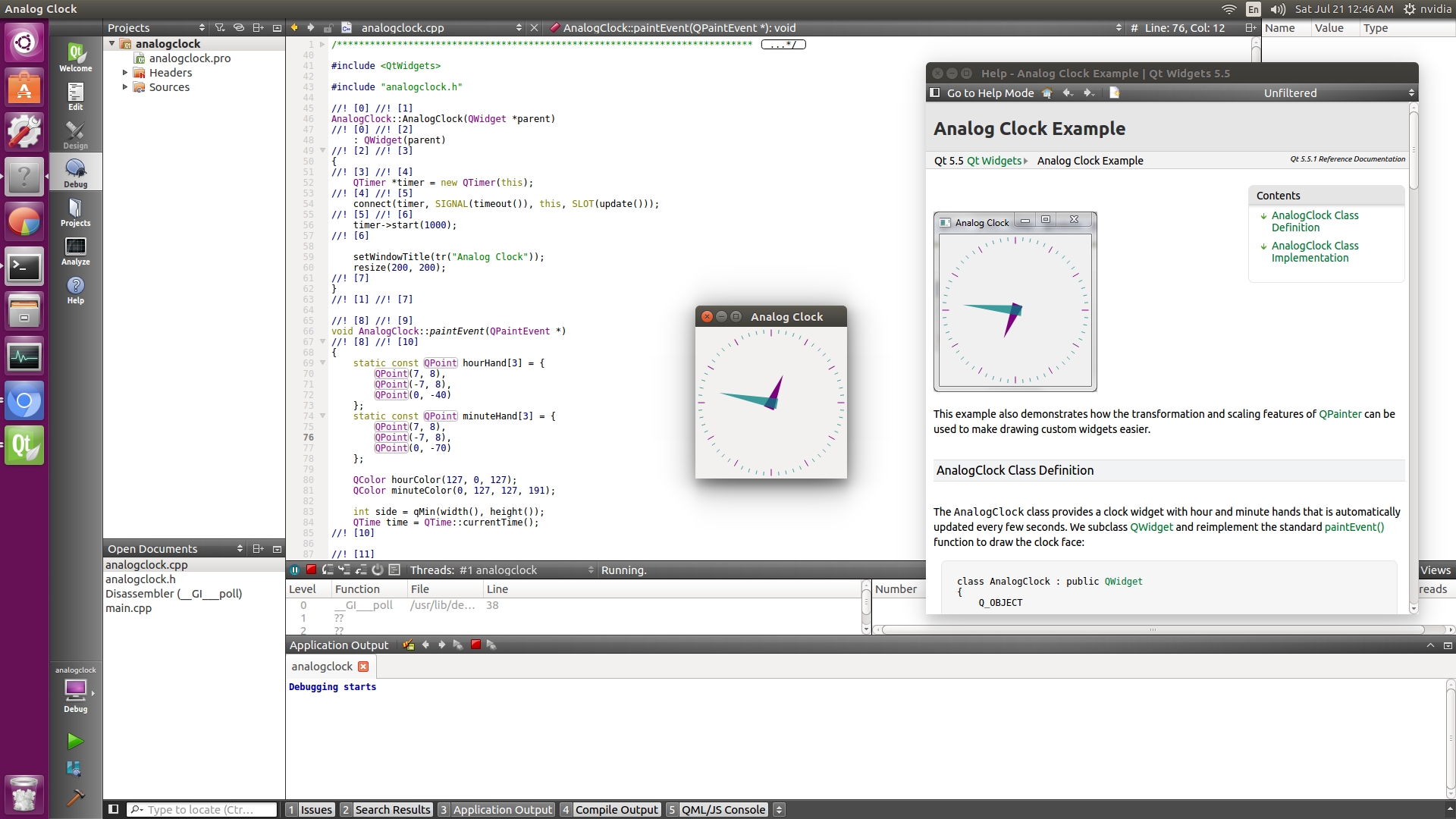
For coding on Jetson TX2, considered some frameworks such as VisionWorks, openFrameworks and Cinder. But as you know, they don’t support “aarch64” officially or few information on the internet. Eventually decided to use ROS. This post is about setup memo of ROS and how to run sample program of turtlesim.
$ sudo apt-get install ubuntu-restricted-extras
$ sudo apt-get install libav-tools ffmpeg$ gst-launch-1.0 -v ximagesrc use-damage=0 ! nvvidconv ! 'video/x-raw(memory:NVMM),alignment=(string)au,format=(string)I420,framerate=(fraction)25/1,pixel-aspect-ratio=(fraction)1/1' ! omxh264enc ! 'video/x-h264,stream-format=(string)byte-stream' ! filesink location="test.h264" -e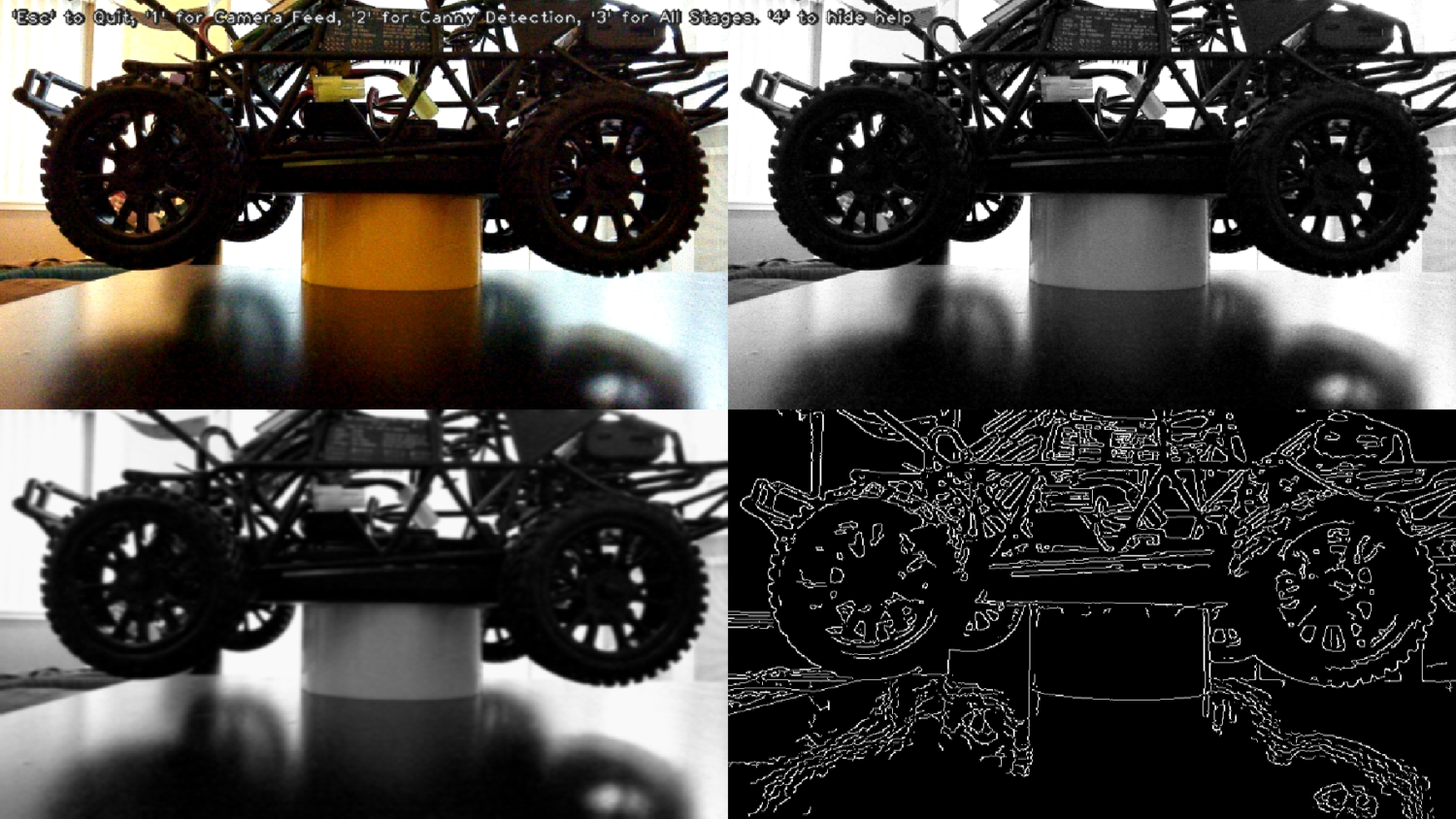
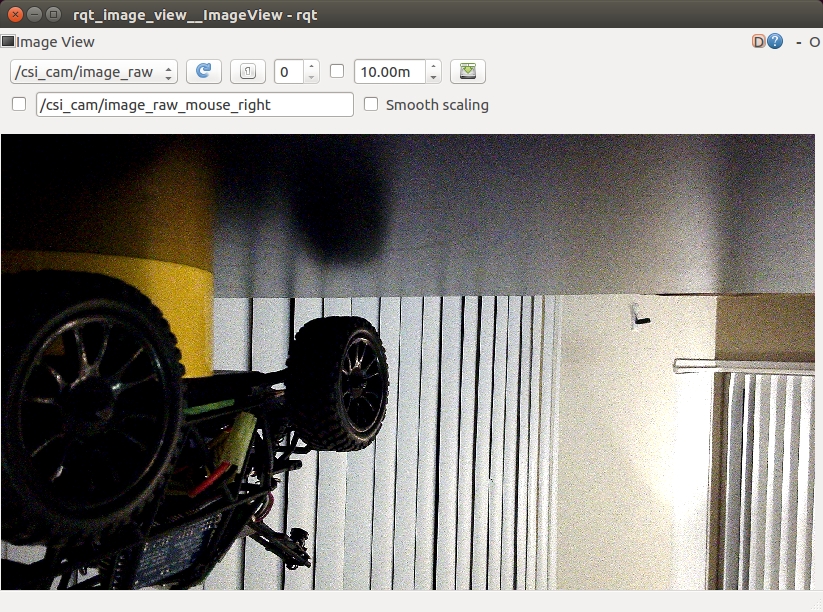
This is my memo to setup OpenCV on Jetson TX2.
This is my memo to setup Jupyter Notebook on Jetson TX2.