For coding on Jetson TX2, considered some frameworks such as VisionWorks, openFrameworks and Cinder. But as you know, they don’t support “aarch64” officially or few information on the internet. Eventually decided to use ROS. This post is about setup memo of ROS and how to run sample program of turtlesim.
Environment
- Jetson TX2
- Ubuntu 16.04
- ROS Kinetic
Delete old ROS
If you have.
$ rosversion -d
kinetic
$ sudo apt-get purge ros-kinetic-*
$ sudo apt autoremoveCreate virtual environment
To avoid conflict with OpenCV.
$ pip install virtualenv
$ virtualenv venv_ros
$ source venv_ros/bin/activateInstall ROS
$ cd ~/Downloads
$ git clone https://github.com/jetsonhacks/installROSTX2.git
$ cd installROSTX2
$ ./installROS.sh -p ros-kinetic-desktop -p ros-kinetic-rgbd-launchSetup Workspace
$ ./setupCatkinWorkspace.sh
$ cd ~/catkin_ws/
$ source /opt/ros/kinetic/setup.bashInstall turtlesim
$ rosversion -d
kinetic
$ sudo apt-get install ros-kinetic-turtlesimRun Keyboad Control turtlsim
Should run three terminals.
$ roscore
...
started core service [/rosout]$ rosrun turtlesim turtlesim_node
[ INFO] [1531809691.854791711]: Starting turtlesim with node name /turtlesim
[ INFO] [1531809691.926926757]: Spawning turtle [turtle1] at x=[5.544445], y=[5.544445], theta=[0.000000]
$ rosrun turtlesim turtle_teleop_key
Reading from keyboard
---------------------------
Use arrow keys to move the turtle.
Finish !

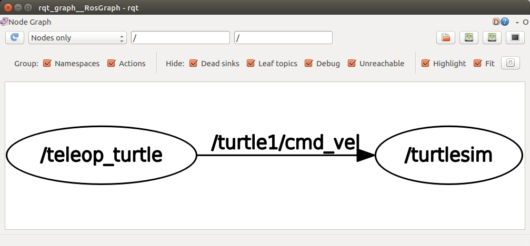
Check rqt_graph
Open new terminal and run below.
$ rosrun rqt_graph rqt_graph