Repository

https://github.com/shirokunet/RCVehiclePy
Videos

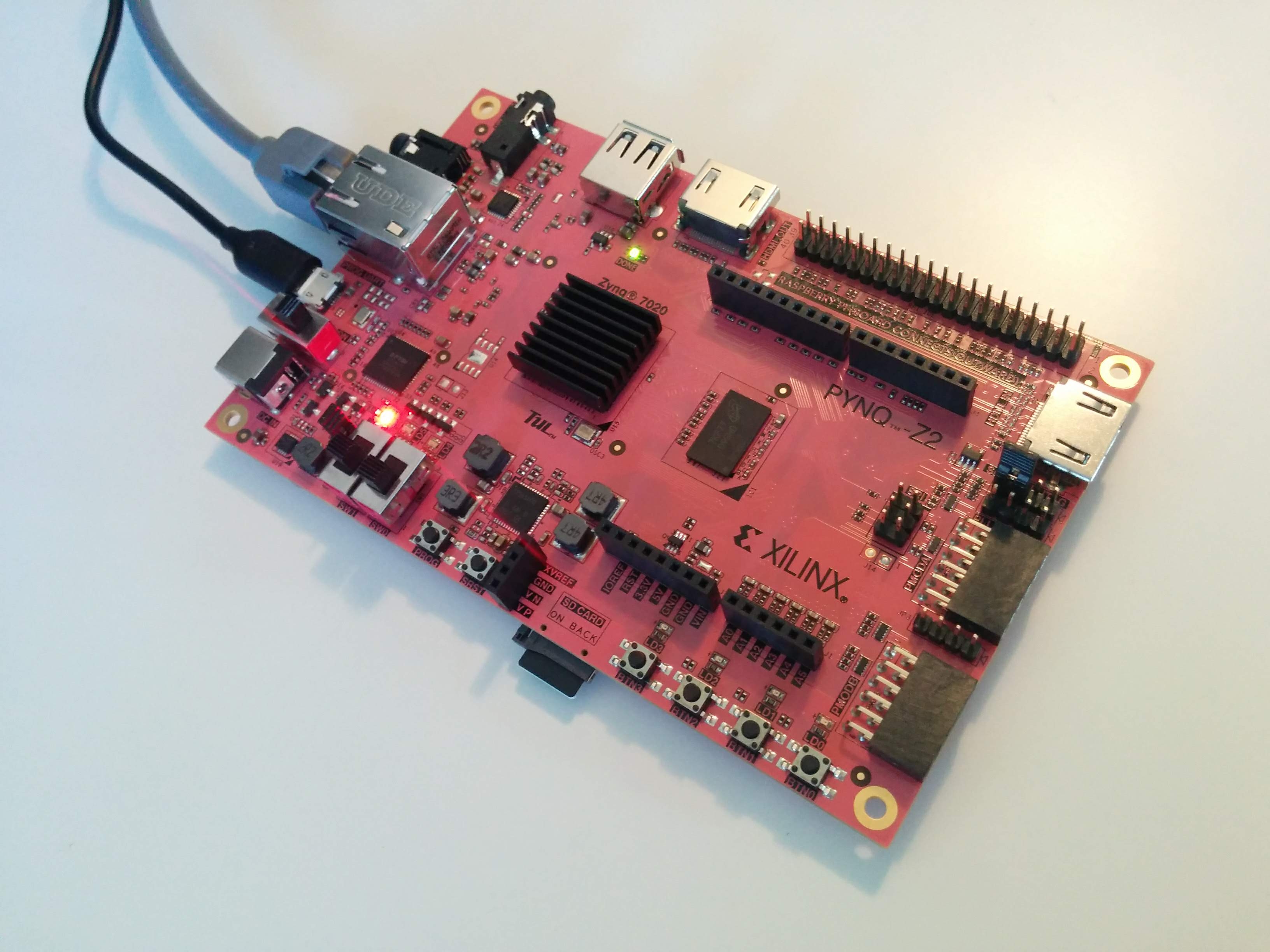
Download momo binary and run on Raspberry Pi 3B to see a Pi’s camera image on Host PC.

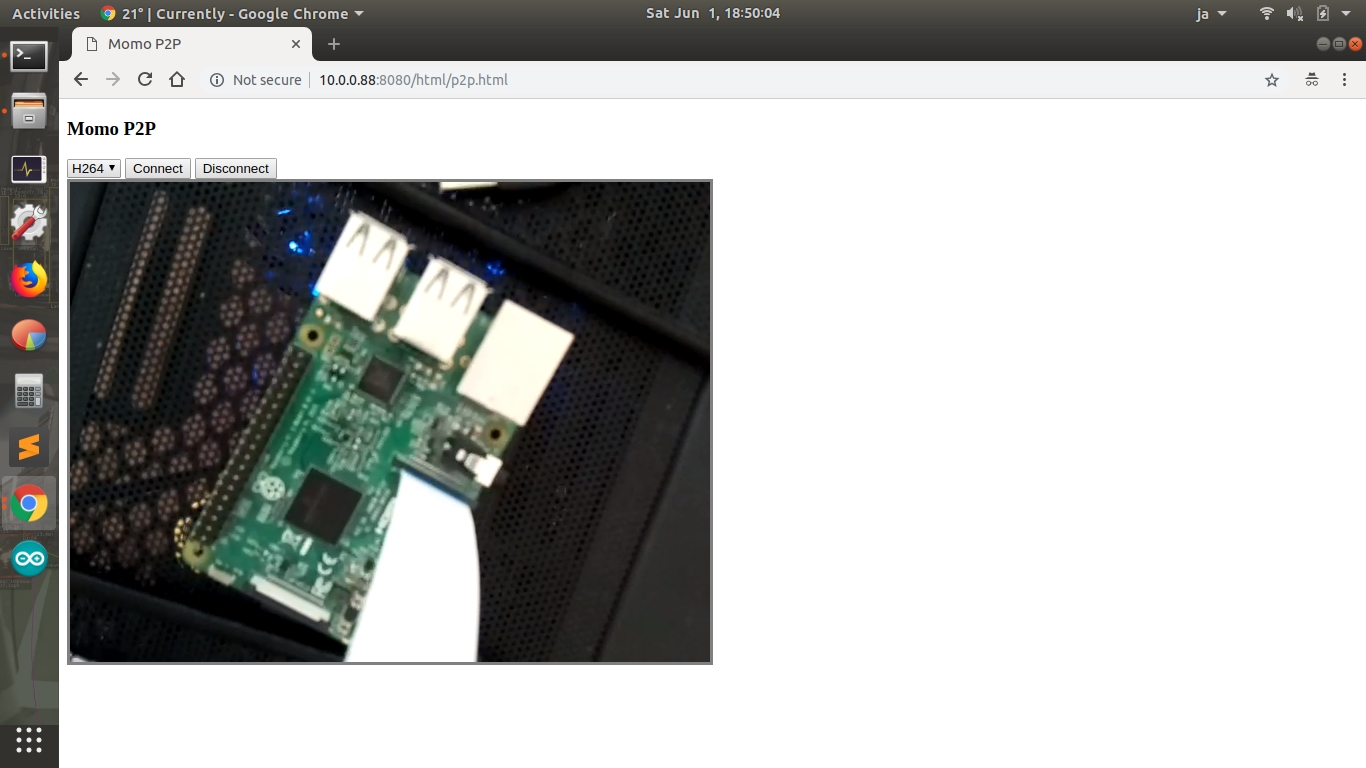
The delay is about 100~300msec.
momo 19.02.0
momo 19.07.0-rc0

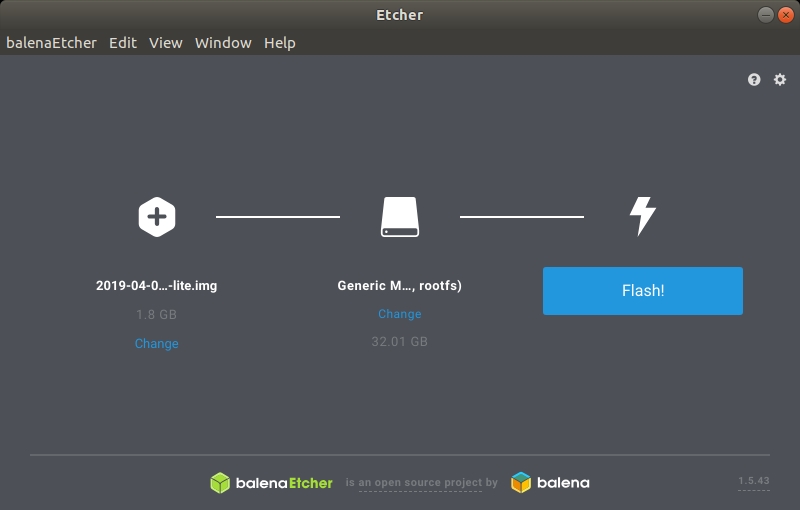
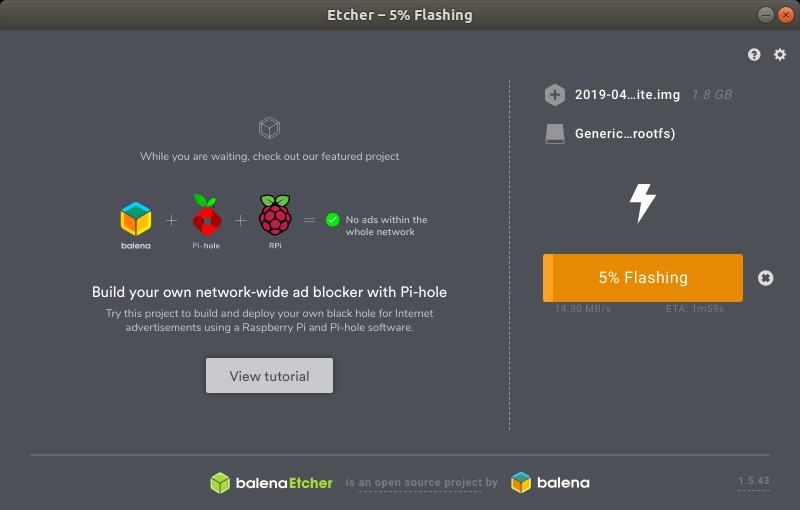
Install Lite Raspbian on Raspberry Pi 3B, and connect to Pi from Host PC using SSH.

ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev
update_config=1
network={
ssid="xxxx"
psk="xxxx"
}
Finish!

This is my final report of TensorFlow class at UCSC.
In this report, we describe that how to prepare dataset and improve the performance of the CNN based lane segmentation by using transfer learning. In addition, we evaluate and compare four types of the methods for lanes segmentation such as the simple rule based method, the CNN based method trained with daytime dataset, the CNN trained daytime dataset filtered gamma correction, and the CNN trained high diversity road dataset.