Category: Robotics
-

-

Run WebRTC Native Client Momo on Raspberry Pi 3B
Goal Download momo binary and run on Raspberry Pi 3B to see a Pi’s camera image on Host PC. Environment Server: Raspberry Pi 3B Client: X220 (Ubuntu 18.04) Momo: 19.07.0-rc0 Setup Camera Connect a camera to Pi $ vcgencmd get_camera supported=1 detected=1 # Should be like this Setup Library $ sudo apt-get install libnspr4 libnss3…
-

Raspberry Pi 3B Setup
Goal Install Lite Raspbian on Raspberry Pi 3B, and connect to Pi from Host PC using SSH. Environment Host PC: Ubuntu 16.04 Client PC: Raspberry Pi 3B Prepare SD card using Host PC Get Etcher to burn the image file. Get the Raspbian Stretch Lite from raspberrypi.org. Burn zip image file to a blank SD…
-

Robust Highway Lane Segmentation Based on LaneNet Trained BDD100K
This is my final report of TensorFlow class at UCSC. Abstract In this report, we describe that how to prepare dataset and improve the performance of the CNN based lane segmentation by using transfer learning. In addition, we evaluate and compare four types of the methods for lanes segmentation such as the simple rule based…
-

-
Implement Serial Communication between Host PC and Mbed
Environment Host PC: Ubuntu 16.04 Device: NUCLEO F446RE
-
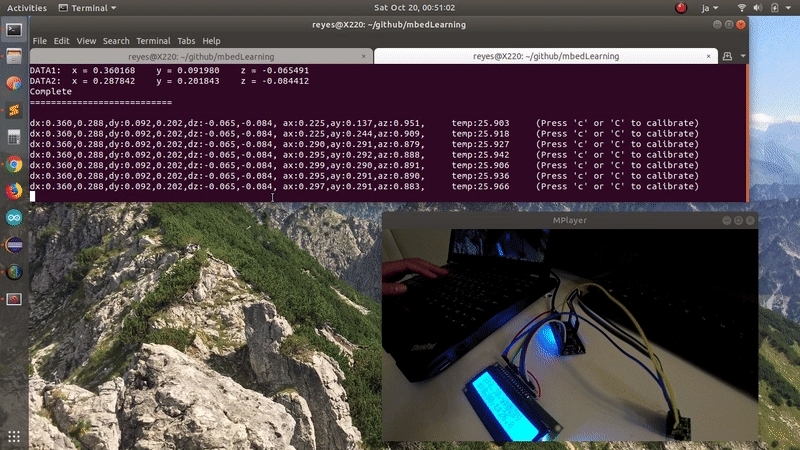
Write MPU9250 Calibration Data to Flash Memory on Mbed NXP LPC1768
Environment Host PC: Ubuntu 18.04 Device: mbed NXP LPC1768
-
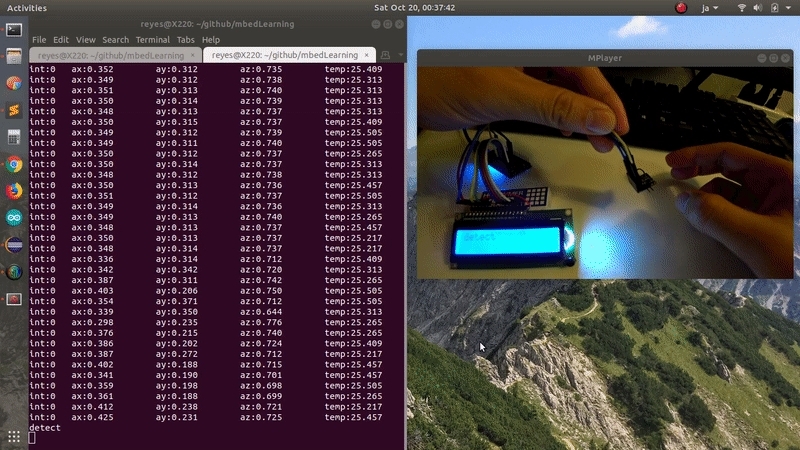
Using MPU9250 Interrupt on Mbed NXP LPC1768
Environment Host PC: Ubuntu 18.04 Device: mbed NXP LPC1768
-

Show MPU9250 Data on LCD Using Mbed NXP LPC1768
Environment Host PC: Ubuntu 18.04 Device: mbed NXP LPC1768
-