SHIROKU.NET
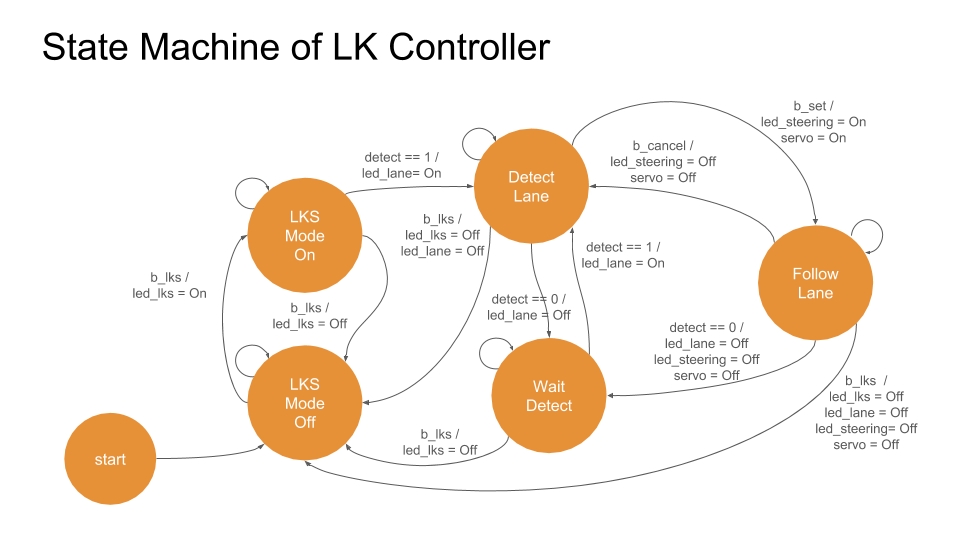
Simple Finite State Machine for HMI of ADAS using freeRTOS
Written by
shiroku
in
Robotics
Environment
Windows 7 Professional
Microsoft Visual Studio Community 2015
FreeRTOS v10.0.1
Code
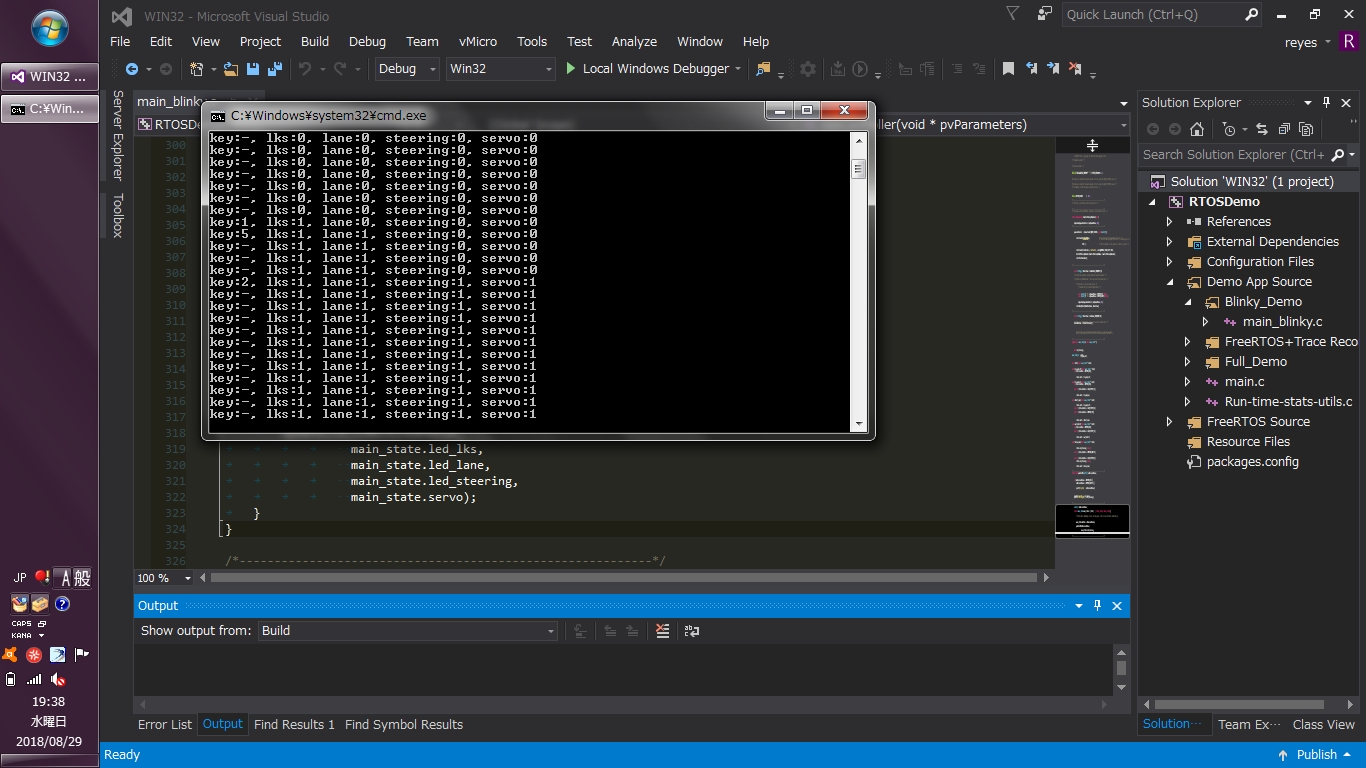
Based this project “FreeRTOS/Demo/WIN32-MSVC”, modified “main_blinky.c”.
Result
FreeRTOS
FSM
VisualStudio
←
Test Design ADAS Camera of Jetson TX2
Print Polycarbonate filament on LULZBOT TAZ6
→
More posts
2025年振り返り
2025-12-31
2024年振り返り
2025-01-01
2023年振り返り
2023-12-31
2022年振り返り
2022-12-31