It’s a kind of subsumption architecture model.
Looks smart like Roomba. But actually, really simple system.
Environment
- Ubuntu 16.04
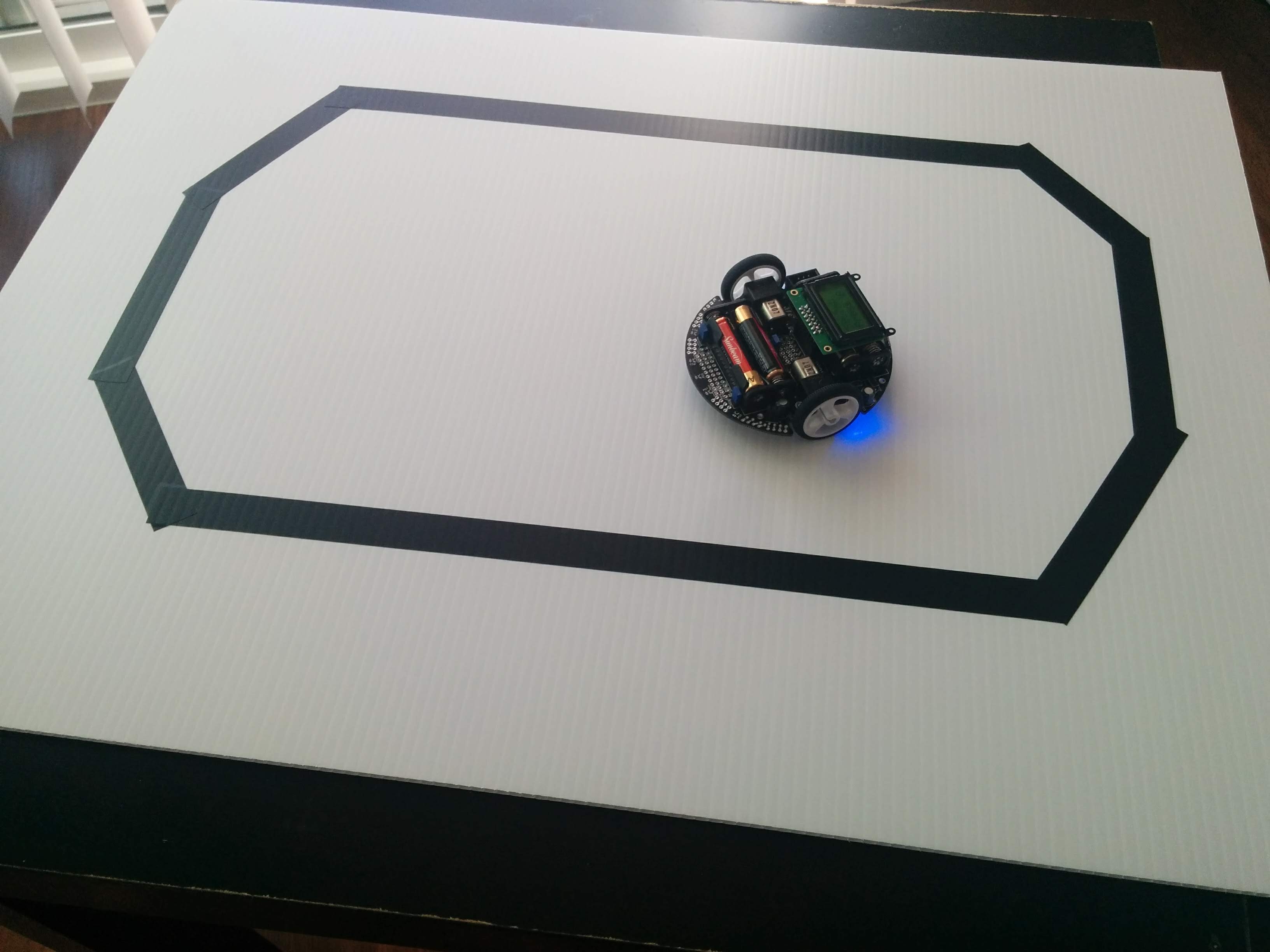
- Pololu 3pi Robot (ATmega328P)
C code
Result
I assume that it can be a home cleaning robot.
It’s a kind of subsumption architecture model.
Looks smart like Roomba. But actually, really simple system.
I assume that it can be a home cleaning robot.