
Month: October 2018
-

-
Implement Serial Communication between Host PC and Mbed
Environment Host PC: Ubuntu 16.04 Device: NUCLEO F446RE
-
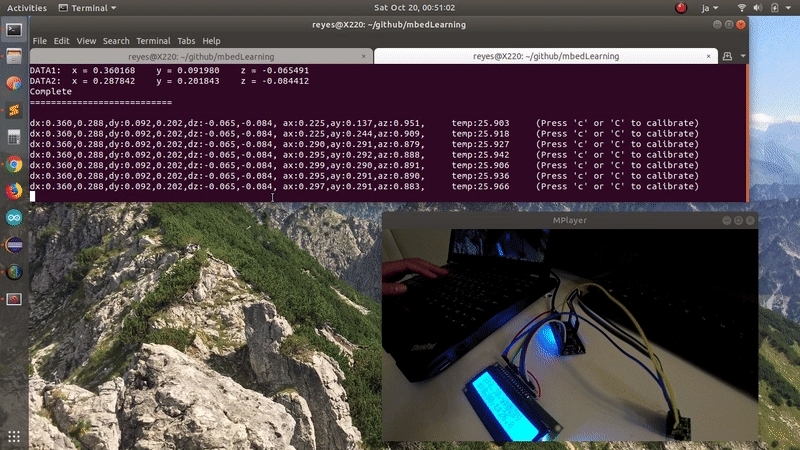
Write MPU9250 Calibration Data to Flash Memory on Mbed NXP LPC1768
Environment Host PC: Ubuntu 18.04 Device: mbed NXP LPC1768
-
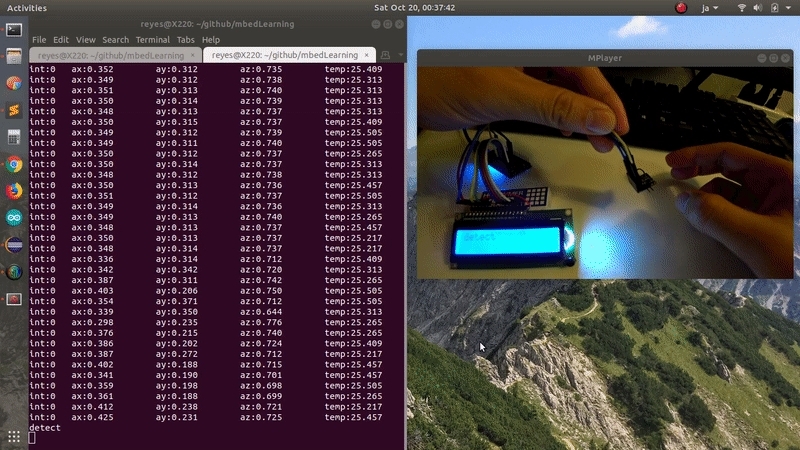
Using MPU9250 Interrupt on Mbed NXP LPC1768
Environment Host PC: Ubuntu 18.04 Device: mbed NXP LPC1768
-

Show MPU9250 Data on LCD Using Mbed NXP LPC1768
Environment Host PC: Ubuntu 18.04 Device: mbed NXP LPC1768
-
-
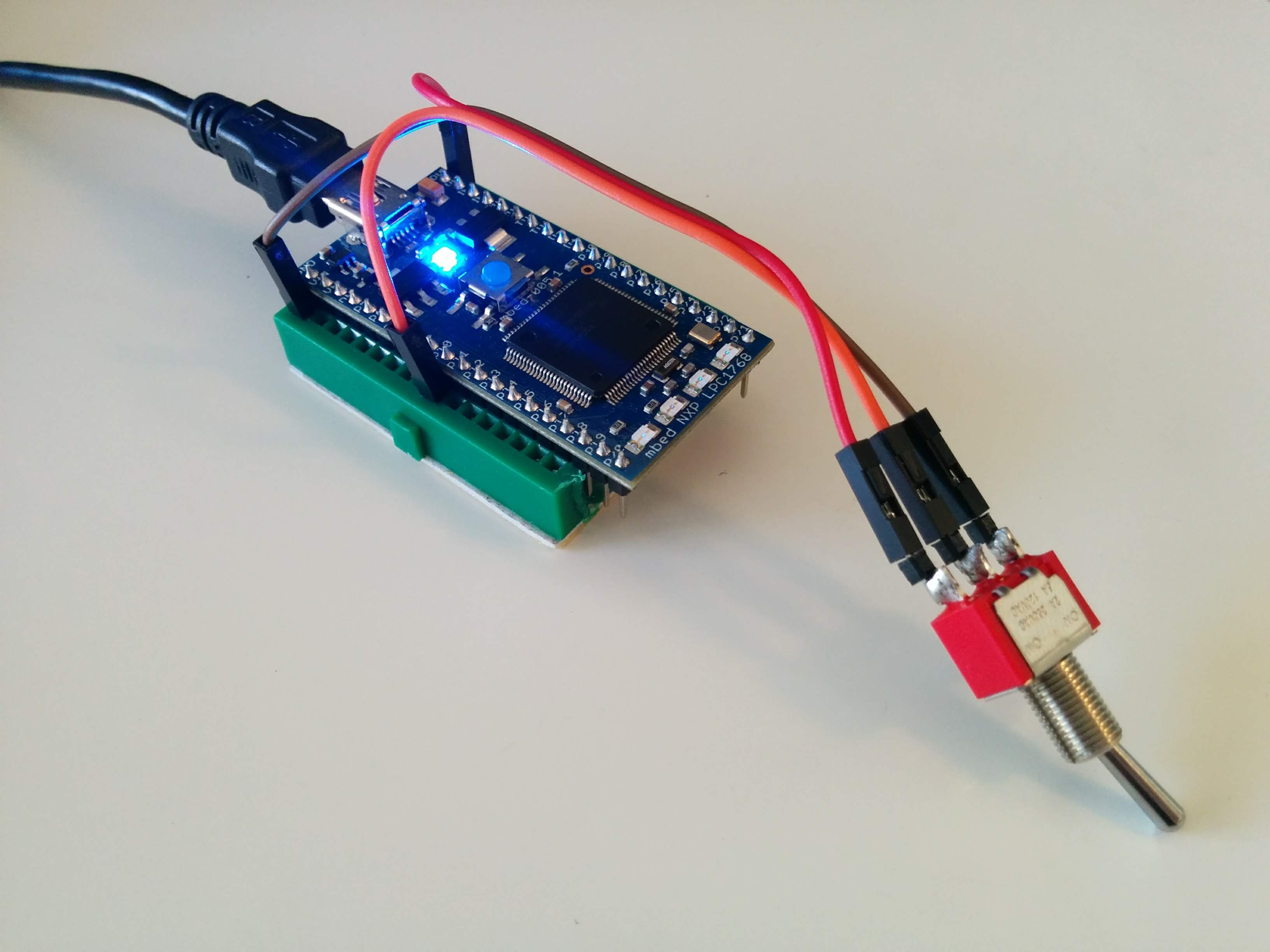
Implement Debounce Function for SPDT Switch on Mbed NXP LPC1768
Environment Host PC: Ubuntu 18.04 Device: mbed NXP LPC1768 Switch: EG2350-ND
-
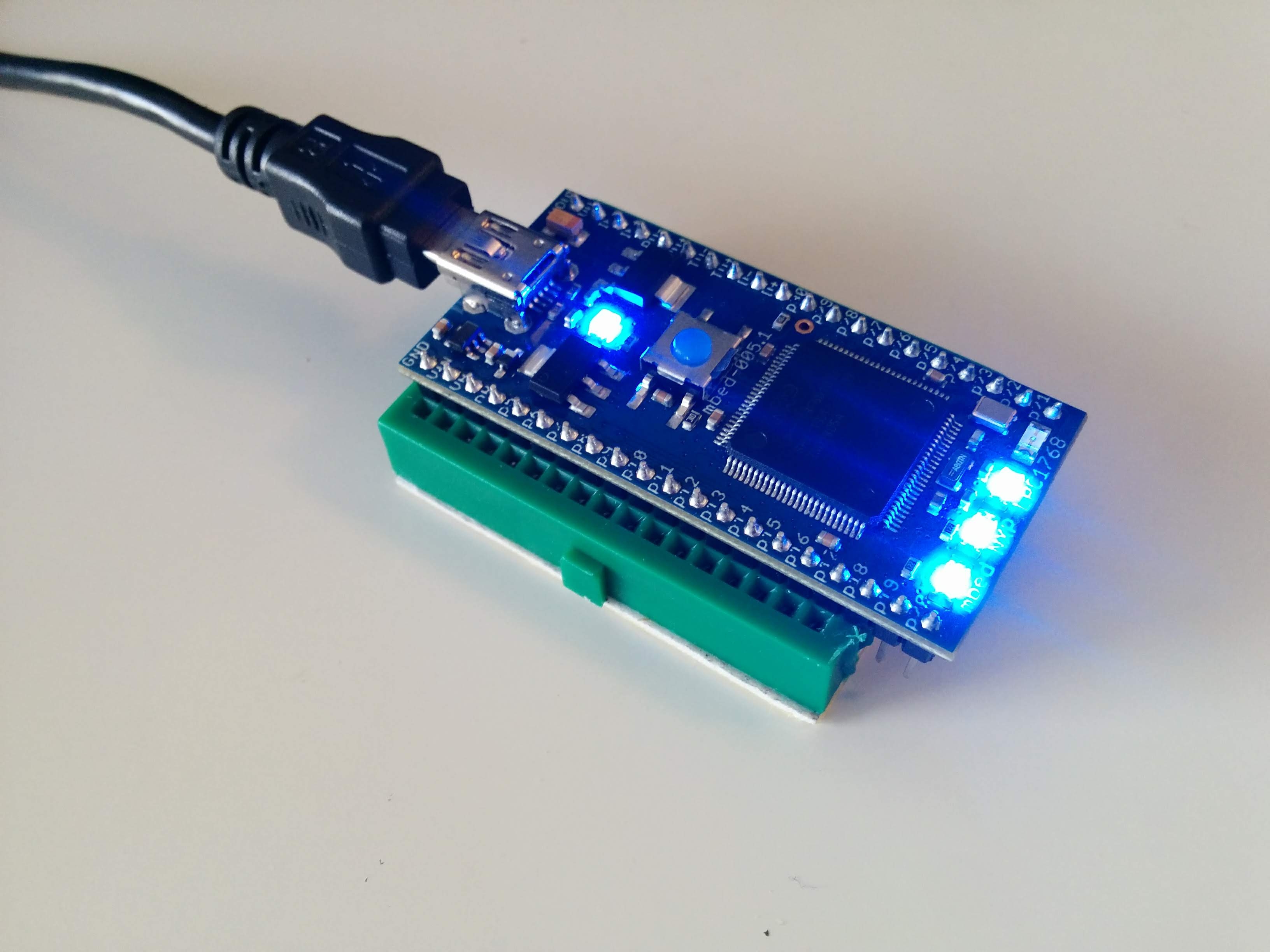
Blink Three LED Using Timer and Ticker Function on Mbed NXP LPC1768
Environment Host PC: Ubuntu 16.04 Device: mbed NXP LPC1768