
Tag: JetsonTX2
-

-
-
-

-
-
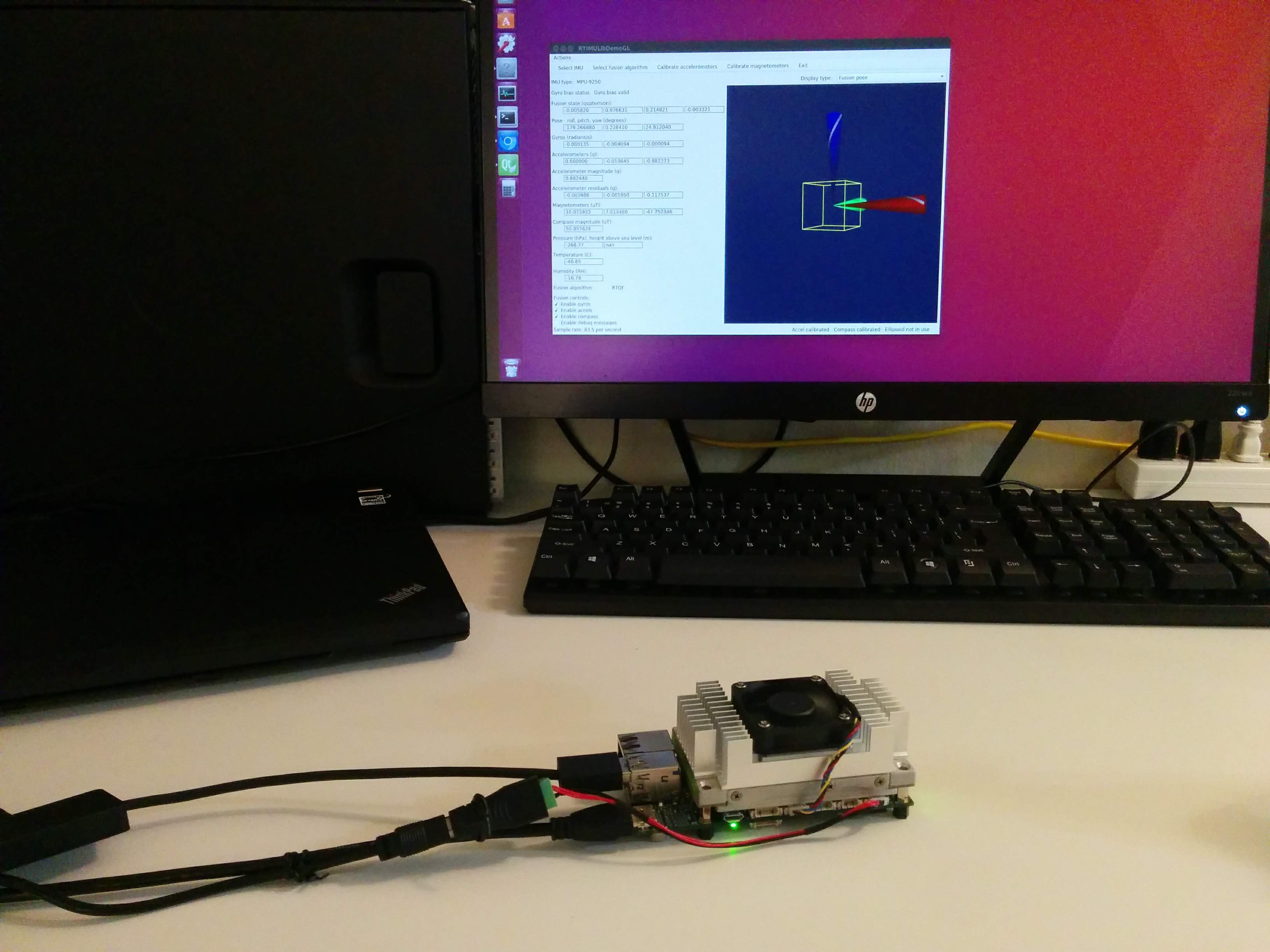
Test RTIMULib on J120-IMU with Jetson TX2
Environment Jetson TX2 JetPack 3.1 Auvidea J120-IMU J120 firmware (kernel and patches) v1.5
-
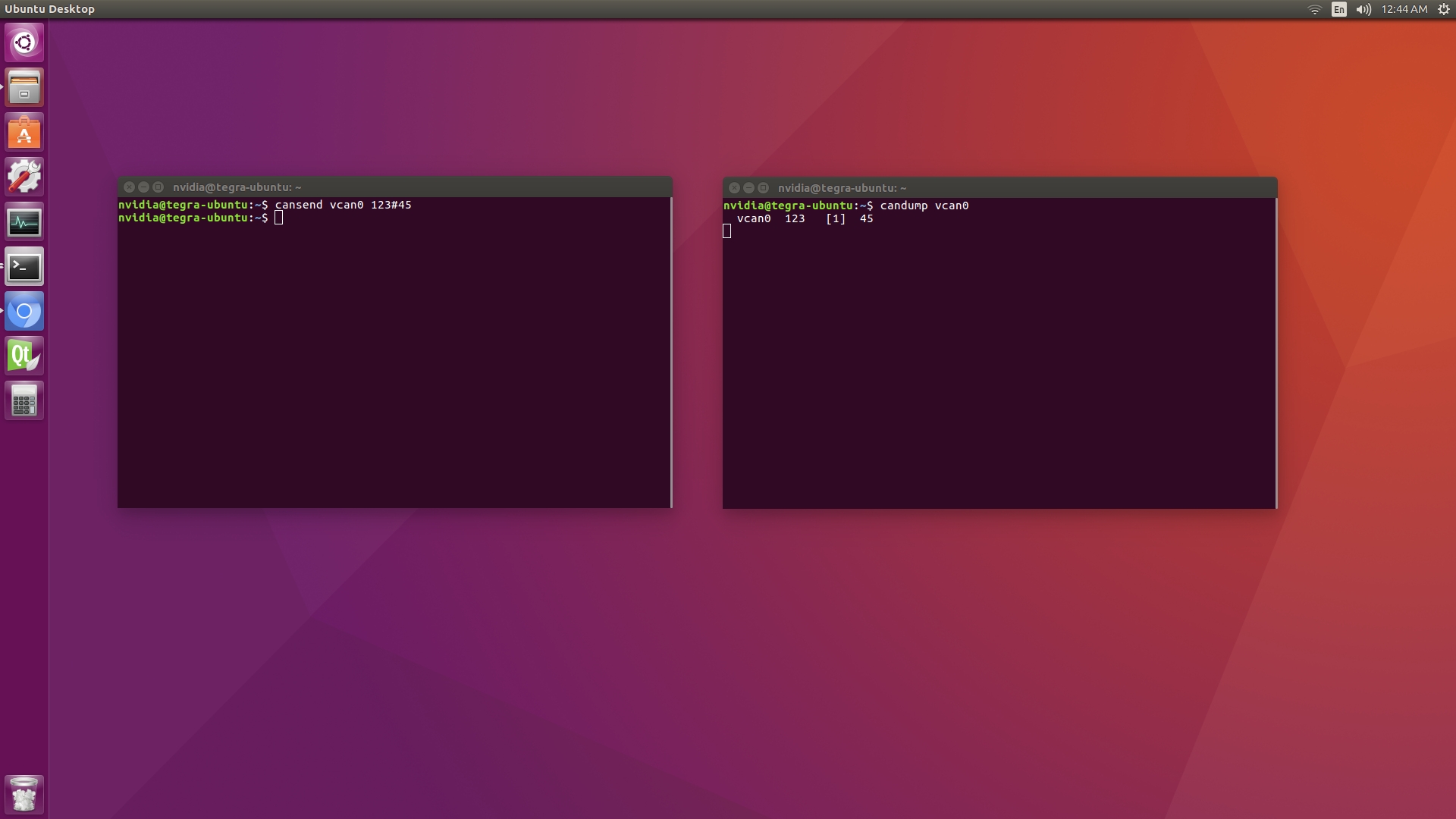
Test Virtual CAN on J120-IMU with Jetson TX2
Environment Jetson TX2 JetPack 3.1 Auvidea J120-IMU J120 firmware (kernel and patches) v1.5
-

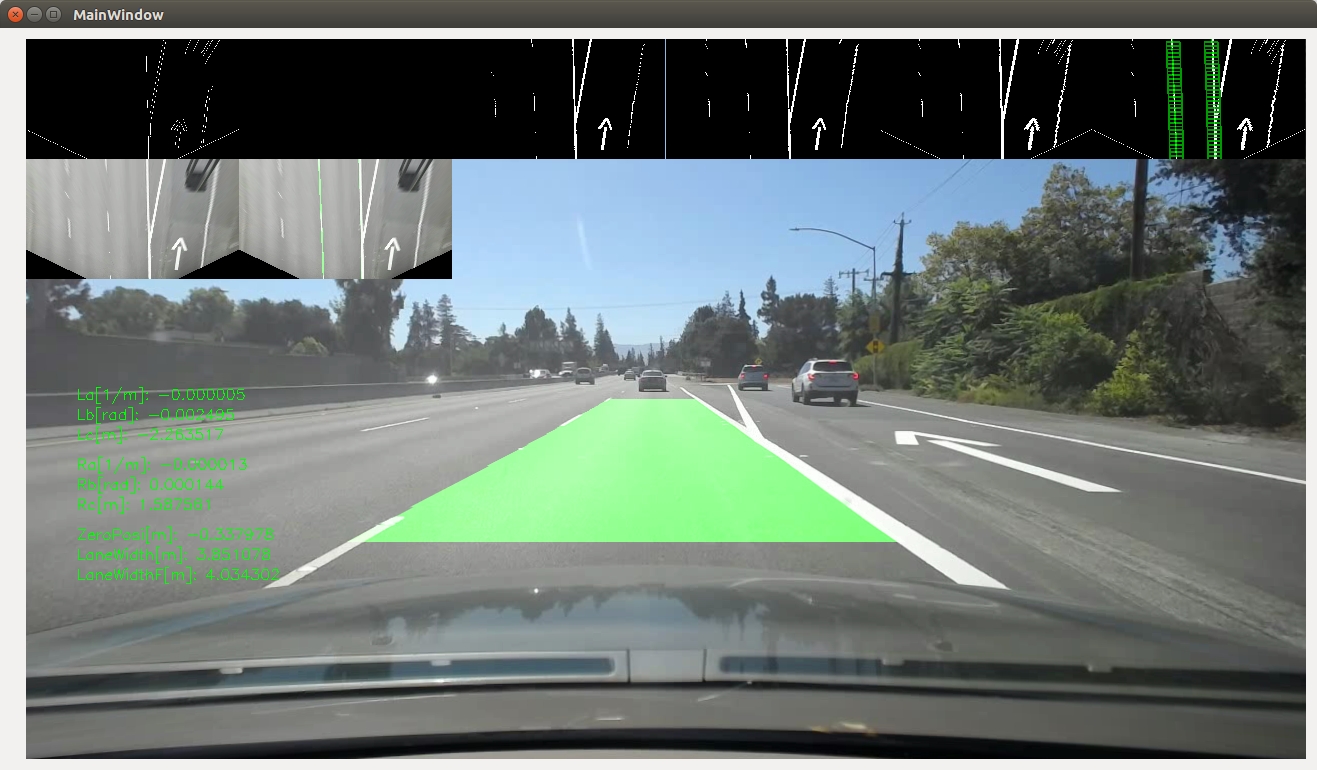
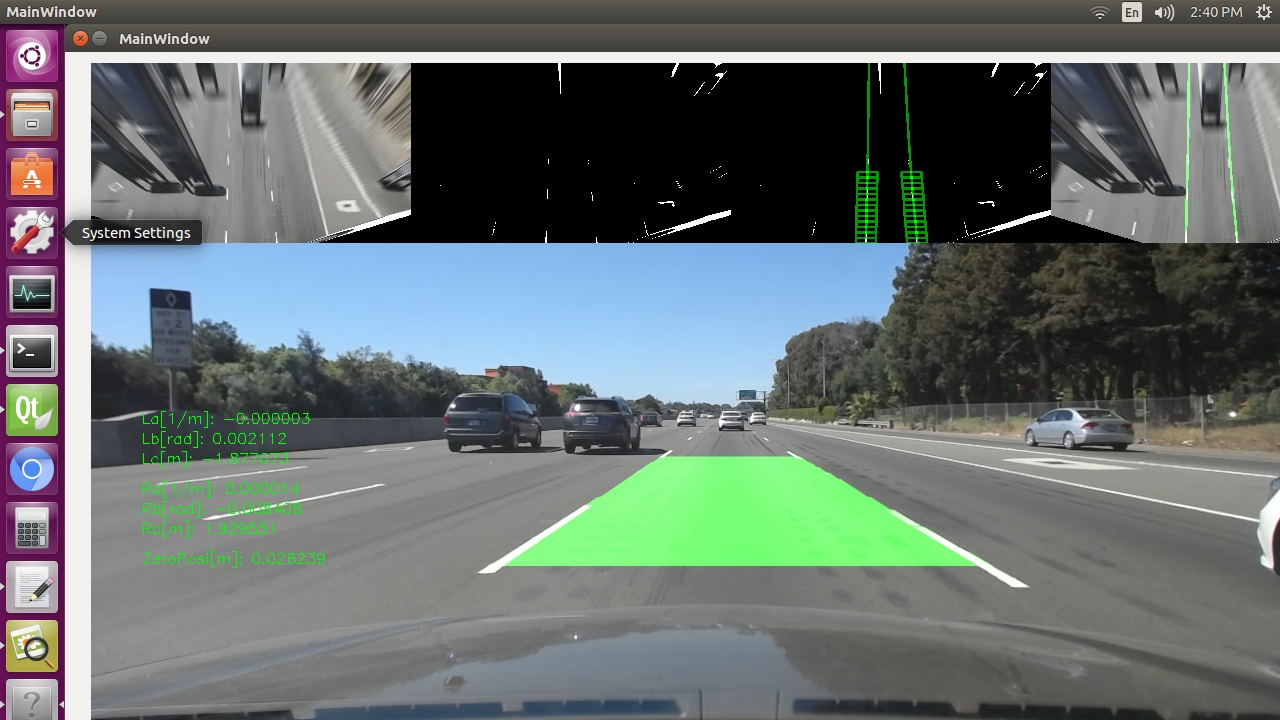
Real Time Lane Detection on Jetson TX2
Environment Host PC: Ubuntu 16.04 Jetson TX2 JetPack 3.1 OpenCV 3.4.0
-

Setup J120-IMU for Jetson TX2
As you know, official JetPack doesn’t support for J120-IMU. In fact, could not use USB port when I attached Jetson TX2 to Auvidea J120-IMU. This post is to install a path of J120 by using JetPack installer. Environment Host PC: Ubuntu 16.04 Jetson TX2 JetPack 3.1 Auvidea J120-IMU J120 firmware (kernel and patches) v1.5
-
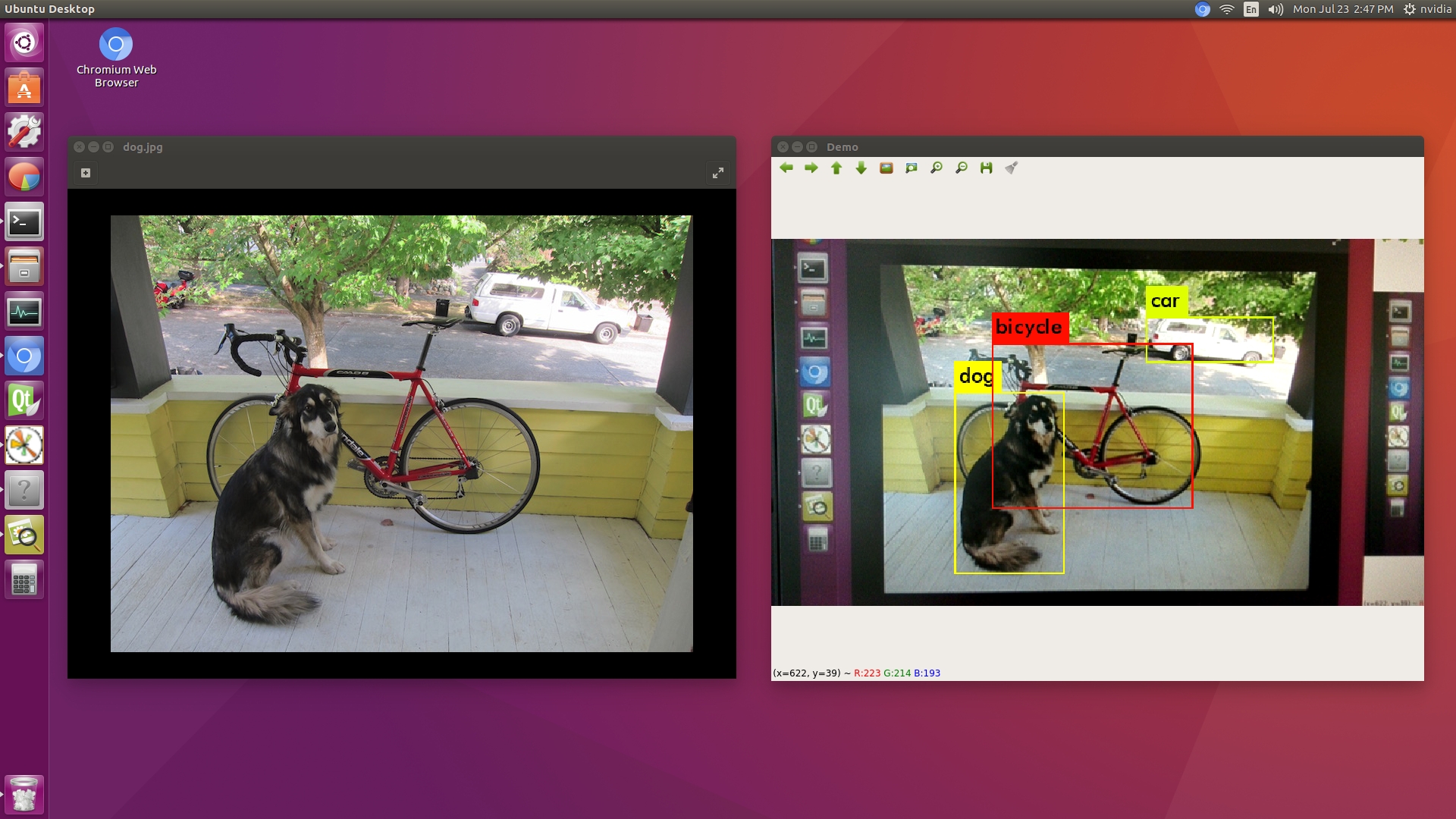
YOLO v3 with Onboard Camera on Jetson TX2
Environment Jetson TX2 Ubuntu 16.04 OpenCV 3.4.0 gcc 5.5.0 YOLO v3