Environment
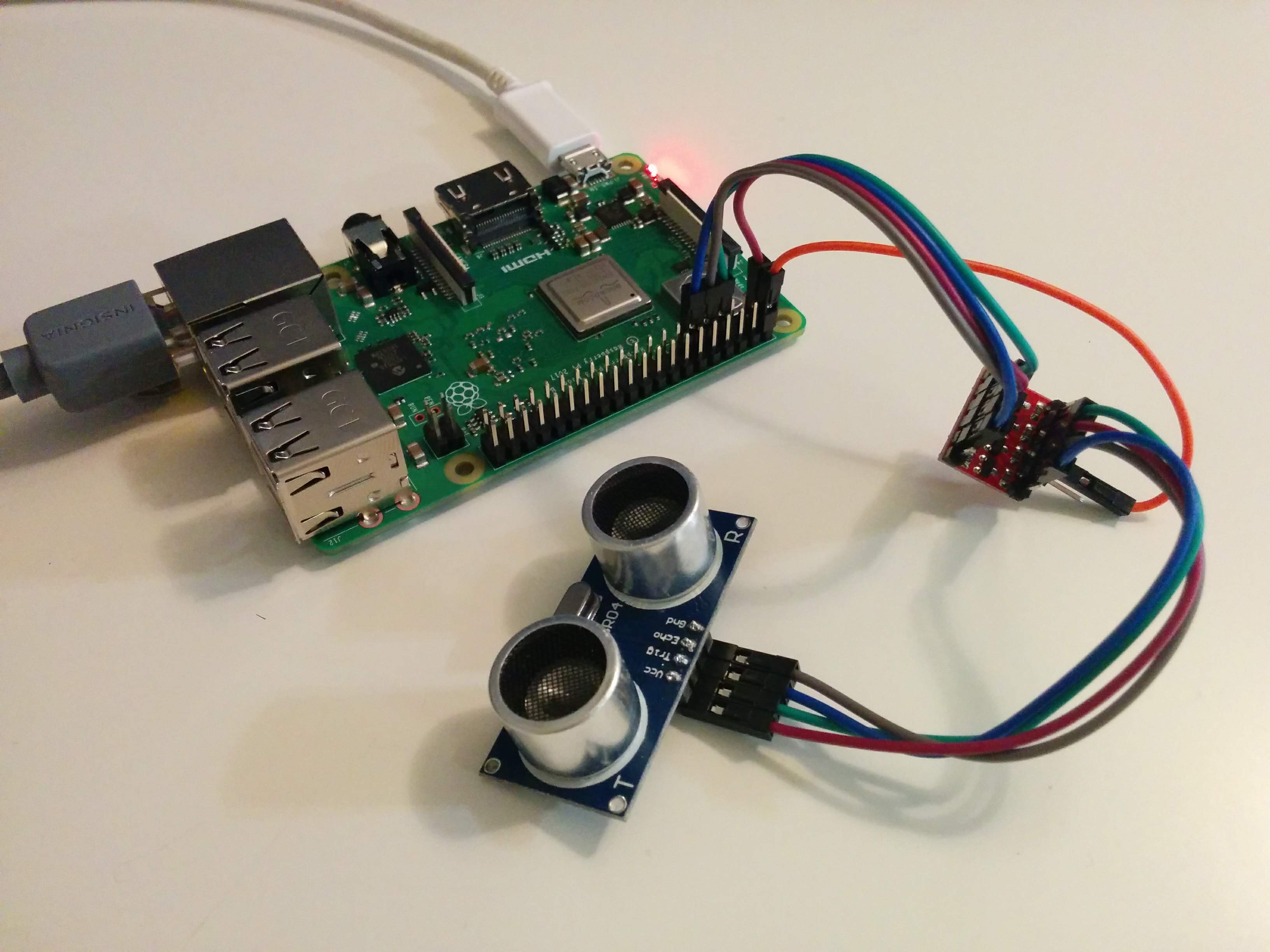
- Raspberry Pi 3B+
- Raspbian GNU/Linux 9.4
- Python 3
- HC-SR04 Ultrasonic Module
- 3.3V-5V Logic Level Converter CYT1076
Code
$ vim sonicsensor.py
#!/usr/bin/python3
import RPi.GPIO as GPIO
import time
class UltraSonic:
def __init__(self):
# GPIO Mode (BOARD / BCM)
GPIO.setmode(GPIO.BCM)
# set GPIO Pins
self.GPIO_TRIGGER = 4
self.GPIO_ECHO = 17
# set GPIO direction (IN / OUT)
GPIO.setup(self.GPIO_TRIGGER, GPIO.OUT)
GPIO.setup(self.GPIO_ECHO, GPIO.IN)
def distance(self):
# set Trigger to HIGH
GPIO.output(self.GPIO_TRIGGER, True)
# set Trigger after 0.01ms to LOW
time.sleep(0.00001)
GPIO.output(self.GPIO_TRIGGER, False)
starttime = time.time()
stoptime = time.time()
# save StartTime
while GPIO.input(self.GPIO_ECHO) == 0:
starttime = time.time()
# save time of arrival
while GPIO.input(self.GPIO_ECHO) == 1:
stoptime = time.time()
# time difference between start and arrival
timeelapsed = stoptime - starttime
# multiply with the sonic speed (34300 cm/s)
# and divide by 2, because there and back
distance = (timeelapsed * 34300) / 2
return distance
if __name__ == '__main__':
try:
us = UltraSonic()
while True:
dist = us.distance()
print ("Measured Distance = %.1f cm" % dist)
time.sleep(0.1)
except KeyboardInterrupt:
print("Measurement stopped by User")
GPIO.cleanup()
Result
$ python sonicsensor.py
Measured Distance = 168.6 cm
Measured Distance = 169.9 cm
Measured Distance = 8.5 cm
Measured Distance = 10.0 cm
Measured Distance = 11.4 cm
Measured Distance = 11.2 cm
Reference