SHIROKU.NET
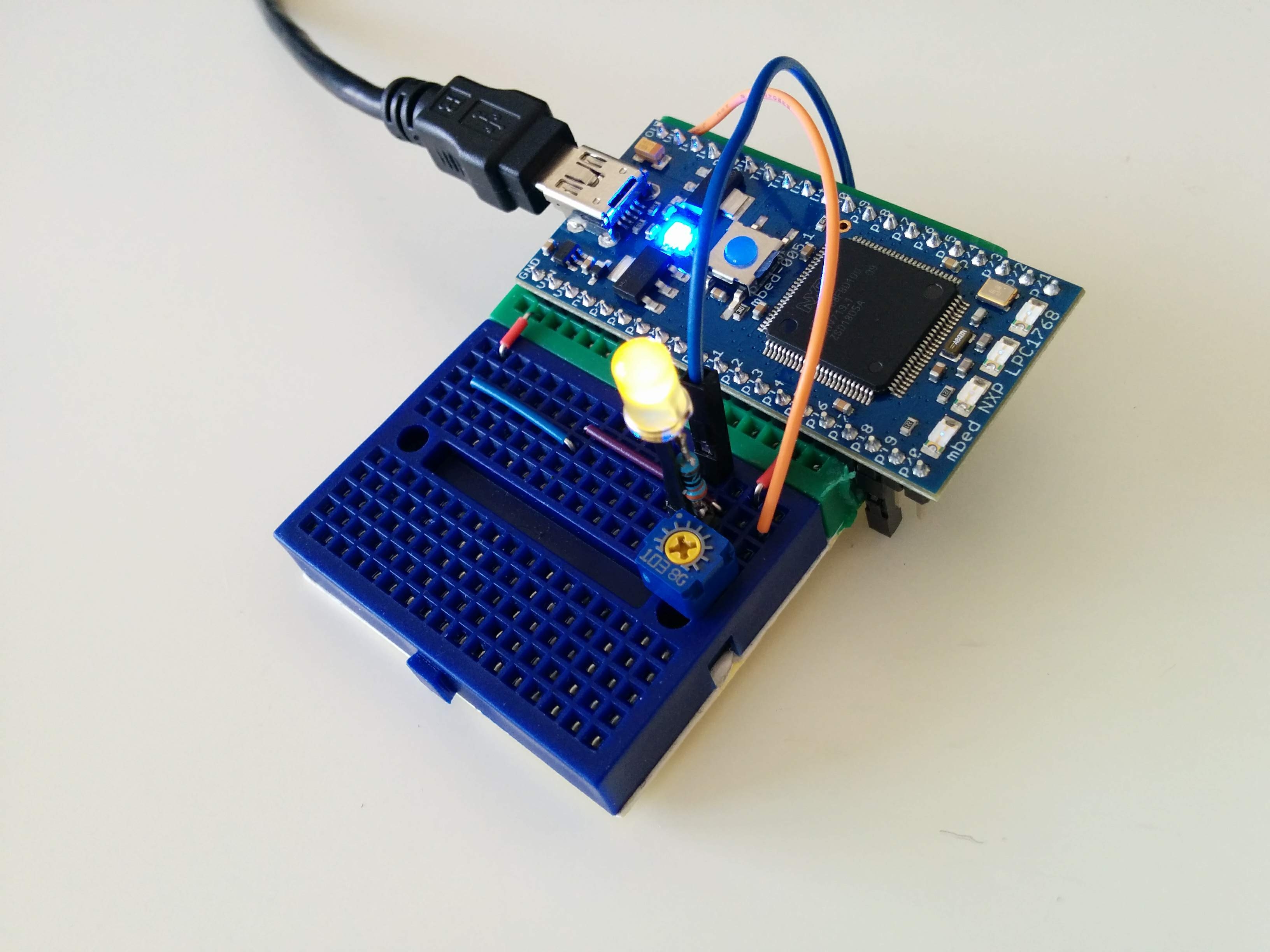
Modulate Light Intensity of an LED using DAC on Mbed NXP LPC1768
Written by
shiroku
in
Robotics
Environment
Host PC: Ubuntu 16.04
Device: mbed NXP LPC1768
Code
mbedLearning/main.cpp at master · shirokunet/mbedLearning
Result
LPC1768
Mbed
←
Using 4 Segment LED Display on Mbed NXP LPC1768
Modulate Light Intensity of an LED using PWM on Mbed NXP LPC1768
→
More posts
2025年振り返り
2025-12-31
2024年振り返り
2025-01-01
2023年振り返り
2023-12-31
2022年振り返り
2022-12-31